08
09月 2023年
新优化 新升级 | 鹰眼三维激光识别仪2.0
浏览数:5697次
HawkEye鹰眼三维激光识别器是基于双目结构光,采用激光振镜投影,大幅面图形获取,AI 算法瞬间完成4㎡区域的零件识别;满足防错漏要求,一个“鹰眼”完成多零件错漏识别。
此次通过“电池壳拉铆有无检测”来检验产品性能的升级。
详细参数:
检测设备 :HawkEye鹰眼三维激光识别器 主机:i7十二代处理器(仅使用CPU计算)
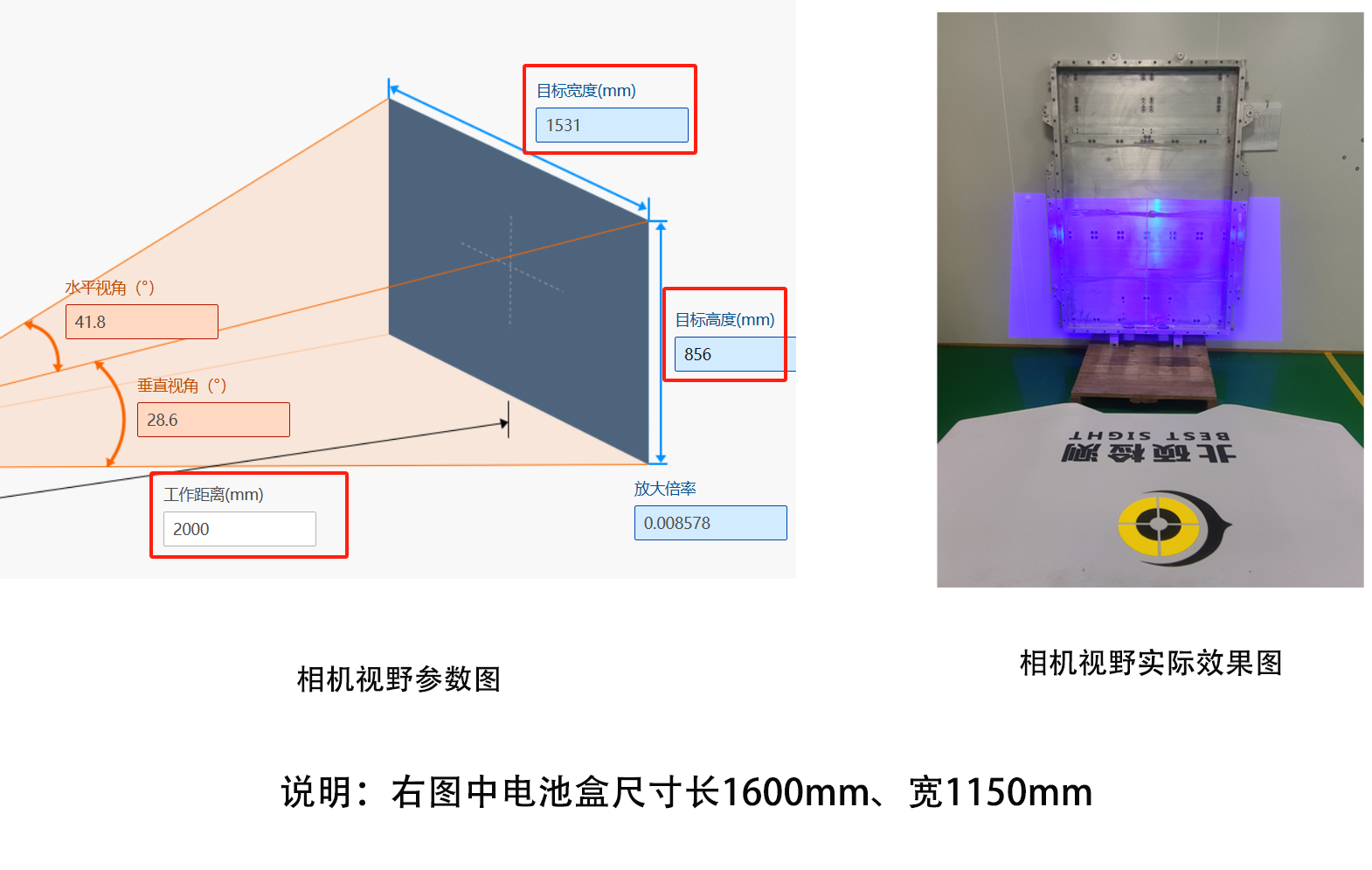
检测零件:电池壳、夹具等 检测内容: 有无检测拍照距离:2000mm 拍照范围(最优):长 1531mm,宽856mm
点云间距:0.35mm左右 点云数量:一千万个点(单个相机单次拍照) 拍照时间(包含点云生成):小于6s
测点计算:小于300ms 可以检测有无的尺寸:零件肉厚≥2mm,同时高度≥2mm。
案例:电池壳拉铆有无检测
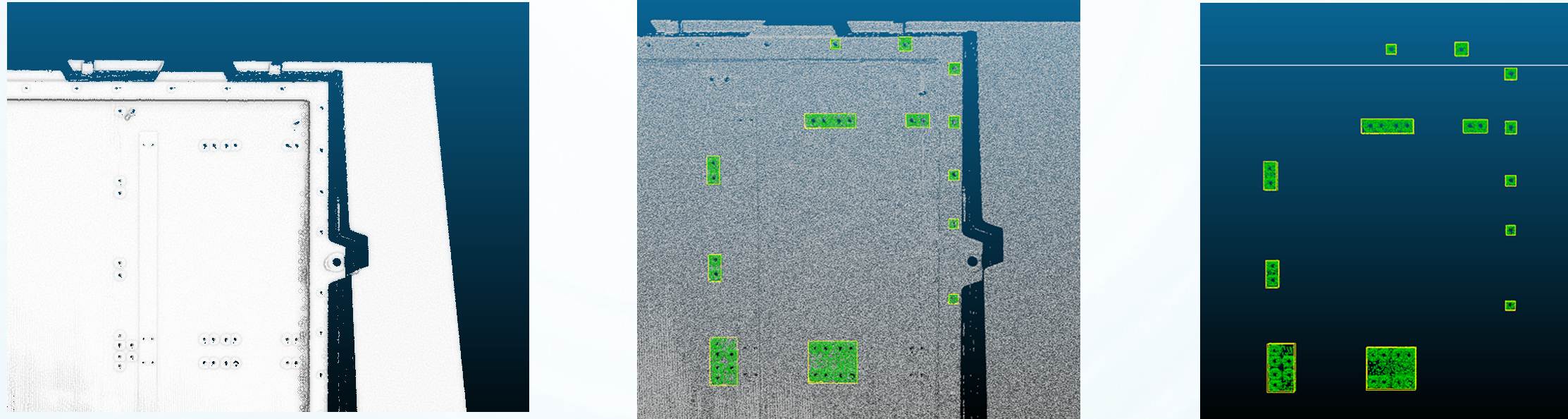
点云质量和算法计算如下图所示:
电池壳定位要求:
为保证拉铆区域选择的有效性,要求待检测的电池壳上拉铆的位置误差在±5mm以内。定位误差与拉铆的间隔大小和尺寸大小有关。
相机拍摄要求:
待检测零件应该处于最佳视野范围内,同时零件拍照距离与标定时的距离越接近效果越好。零件上方需保证没有直射光源,否则会影响拍照效果。
算法说明:
采用点云平面分割的方式,根据底部平面来分割出拉铆的上表面区域,再计算点云体积,算法上稳定可靠,鲁棒性好。
节拍说明:
1、单次拍照6s左右,多次拍照10s左右;
2、拍照生成点云时如果使用GPU加速,同时缩小点云目标区域包围盒大小,减少点云数量,单次拍照生成点云的时间可缩短至4-5s,同时测点计算效率也会增加;
