2024年7月3-5日,苏州北硕亮相上海国际汽车制造技术与装备及材料展览会。本次展会苏州北硕携“机器视觉”众多产品,吸引众多观众,为视觉检测提供全方位的解决方案!

苏州北硕总经理张一丁先生受邀发表了主题演讲《甚于三维视觉的电池盒托盘生产致据建模与分析》,深入剖析了当前行业面临的挑战和机遇,并通过大量案例生动展示了三维视觉在解决这些问题过程中的创新应用方案。演讲内容充实、深入浅出,赢得了参会者的热烈掌声和高度评价。
基于多相机的室内机器人精确定位。在封闭测量室内,壁上张贴有标记点,经过多相机三维重建多相机与3D传感警的手眼标定,多相机空间定位,实现机器人在测量空内的三维精确检测系统。

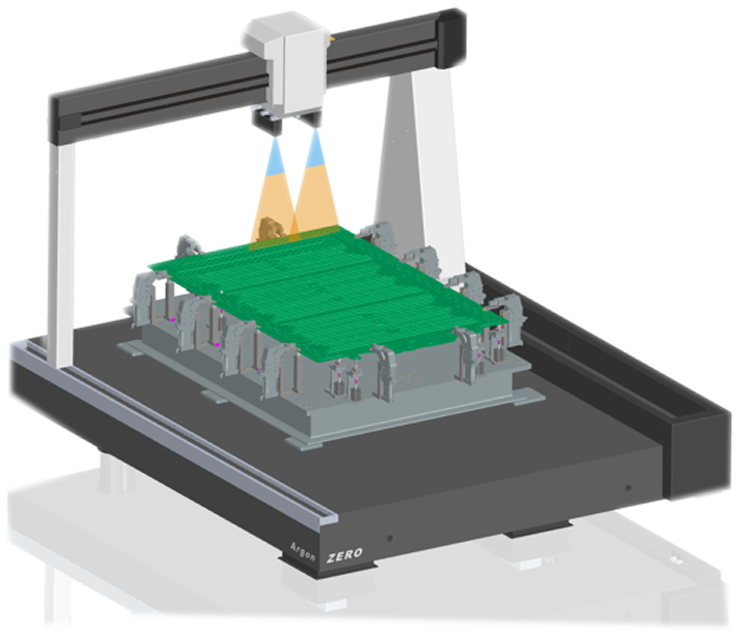
检测站采用3D线扫激光器结合高精运动平台对零件同时进行扫描、生成点云数据,通过数据轻量化等方式实现高速计算分析,提取被测特征进行尺寸分析。
四目错漏检测系统单次拍照即可满足较大区域的点云获取,同时捕获四个角度的图像信息,保证了点云质量的高精度、高可靠性。


基于三维运动跟踪技术,结合人机交互界面(包括显示屏光学投影、激光扫描以及VR/MR等),智能电动工具数字化工艺软件等工业装配现场的智能化手段,对人工装配作业进行实时引导控制实现装配工艺的数字化及智能化。
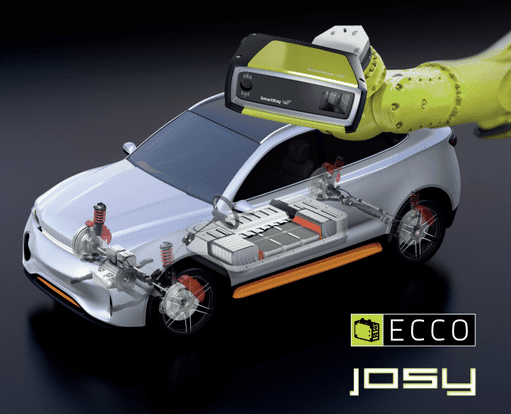
基于机器人底层通讯的控制,可实现高达400mm/s的扫描速度。针对焊缝缺陷的图形算法开发,可分辨0.1mm的焊接缺陷实现了业界最高的识别率。
公司简介

苏州北硕成立于2014年,是一家专业从事三维视觉检测和机器人视觉的高科技公司。获得过江苏省双创人才、苏州市姑苏领军人才和苏州工业园区的科技领军人才等荣誉称号。公司是江苏省工业和信息产业转型升级实验中心,也是苏州市机器人视觉研发及产业规划中心。主要产品包括三维尺寸在线测量系统、焊缝表面缺陷检测系统、漆面缺陷检测系统、机器人三维视觉,广泛服务于“新汽车”、航空航天、工程机械等行业。
在技术方面:自研双目结构光相机的系列产品及其嵌入式算法,自研点云处理、测量算法、机器人高精度补偿、数据分析等重要基础算法,紧跟最新技术发展趋势,自主开发机器人双目视觉跟踪系统、空间立体定位技术,解决机器人绝对精度的国际难题,发表数篇EI等核心论文,申请多项知识产权。通过机器人在线轨迹的算法,与三维点云算法进行融合。结合机器人绝对精度标定,构建机器人视觉应用的技术平台。

